Multi-Human-Swarm-Control
Description: Robot controller (C++) and user interface (javascript) for two operators to interact with a swarm of e-pucks in ARGoS simulation.
- Primary Functionality: Framework for two operators to interact with a swarm of robots.
- Target: C++-based robot
- Task: T4.3
- Responsible: Genki Miyauchi
Overview
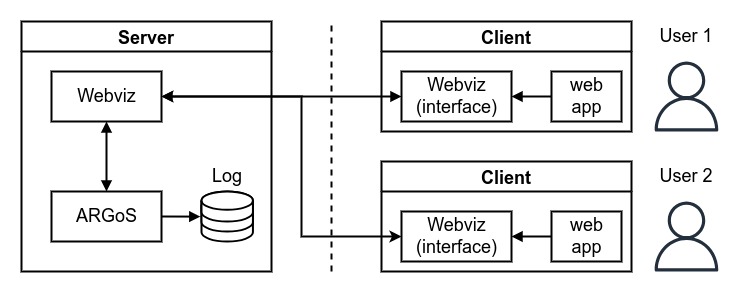
This repository contains the swarm robot controllers and user interface for two users to interact with a swarm of simulated e-puck robots in ARGoS.
ARGoS is used to simulate a swarm of e-puck robots. We use a customized version of Webviz, which is a web interface plugin for ARGoS. This allows multiple users to interact with the same simulation from different devices.
A pair of users can individually access the Webviz interface and work together to use the robot swarm to score points by performing simulated tasks. The user is presented with a first-person perspective view of the simulation environment and are able navigate the environment and send task-related signals to nearby robots.
Published Paper
The Multi-Human-Swarm-Control system was used in a user study presented at IROS 2023 (link to paper).
Sharing the Control of Robot Swarms Among Multiple Human Operators: A User Study
Genki Miyauchi, Yuri K Lopes, and Roderich Groß
In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023
Presentation Video

Installation
Installation instructions and usage can be found in the openswarm-eu/multi-human-swarm-control repository.