MRS UAV Gazebo Simulation
Description: 3D Simulator from Czech Technical University configured to match the hardware from ING's UAVs.
- Primary Functionality: ROS simulator.
- Target: ROS-enabled robots
- Task: T5.1
- Responsible: Micael Couceiro
Starting the simulation
Running the simulation consists of several steps, which are automated using a tmuxinator script.
With the system installed, you can find them (and then copy them elsewhere) by running
roscd mrs_openswarm_simulation/tmux
Each folder contains a different simulation scenario.
The simulation scenario will be started by calling the start.sh script within its folder.
This will call the tmuxinator utility that uses the prescription in the session.yml file to spawn a tmux session.
roscd mrs_openswarm_simulation/tmux/one_drone_3dlidar
./start.sh
Stopping the simulation
You have two options:
- Run the
./kill.shscript. - Hit the killing shortcut:
ctrl+ak(ctrl+aand thenk). A menu will appear in which you confirm the selection.
Pre-prepared simulator
You can run a previously prepared simulator.
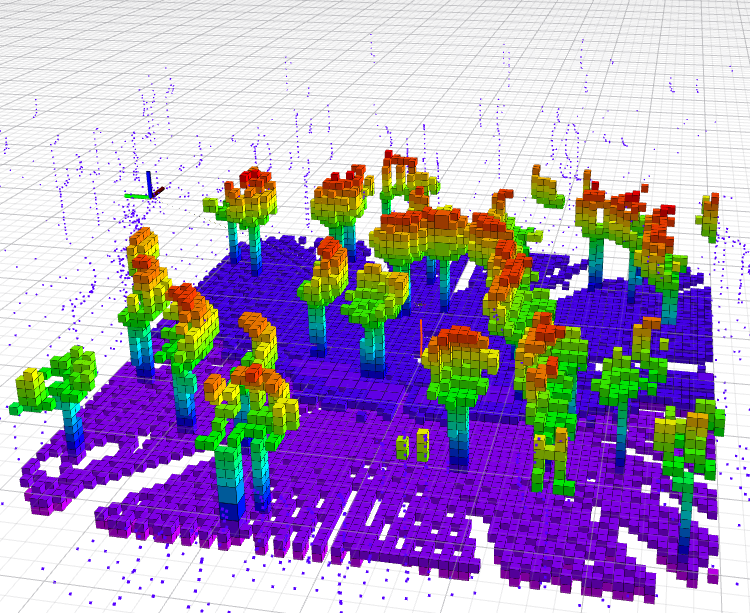
- One drone with 3D Lidar sensors
[MRS Apptainer] user@hostname:~$ roscd mrs_openswarm_simulation/tmux/one_drone_3dlidar
[MRS Apptainer] user@hostname:~$ ./start.sh
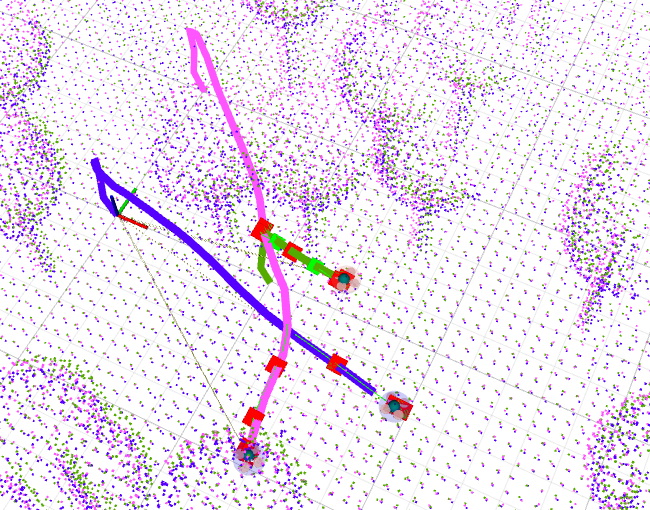
- Three drones with 3D Lidar sensors in swarm formation
[MRS Apptainer] user@hostname:~$ roscd mrs_openswarm_simulation/tmux/three_drones_swarm
[MRS Apptainer] user@hostname:~$ ./start.sh
New simulators
You can copy and paste a tmux folder (e.g three_drones_swarm). Therefore, you can change launch and config files.