Singularity PoC 2
Description: Encapsulation of all ROS packages and dependencies for deployment of the multi-drone PoC system (PoC2).
- Primary Functionality: Singularity recipe.
- Target: ROS-enabled robots
- Task: T5.1
- Responsible: Micael Couceiro
Installing and Running a Singularity Image
This guide provides step-by-step instructions for installing Singularity and running a Singularity image on your system.
Prerequisites
Before starting, ensure the following:
- A Linux-based operating system.
sudoaccess to install packages.- Internet access to download Singularity and the image.
Quick Start Guide (Linux)
- Install Apptainer - install/install_apptainer.sh.
- Create a Apptainer image of the MRS UAV System for OpenSwarm. This should take up to 15 minutes, depending on your internet connection and computer resources.
| build script | description |
|---|---|
| recipes/stable_from_apt_openswarm/build.sh | installs directly from the stable PPA and the ROS-based packages |
-
Copy the
example_wrapper.sh(versioned example) intowrapper.sh(.gitignored). It will allow you to configure the wrapper for yourself. When copying theexample_wrapper.shoutside of themrs_apptainerfolder, theMRS_APPTAINER_PATHvariable within the script needs to be pointed to the correct location of the repository. -
Run the Apptainer container by issuing:
[MRS Apptainer] user@hostname:~$ roscd mrs_uav_gazebo_simulation/tmux/one_drone
[MRS Apptainer] user@hostname:~$ ./start.sh
In this case, you will see:
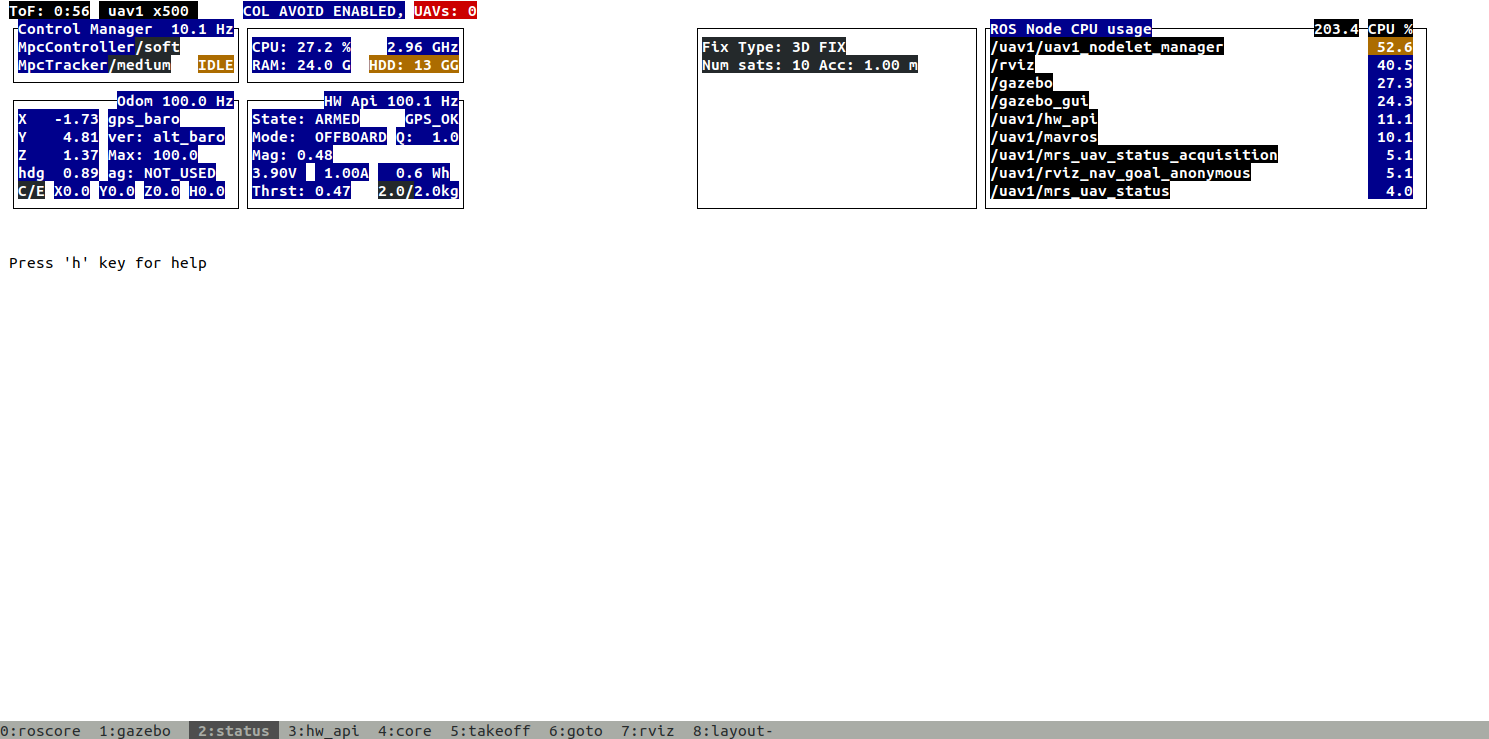
- Gazebo
- Rviz, and
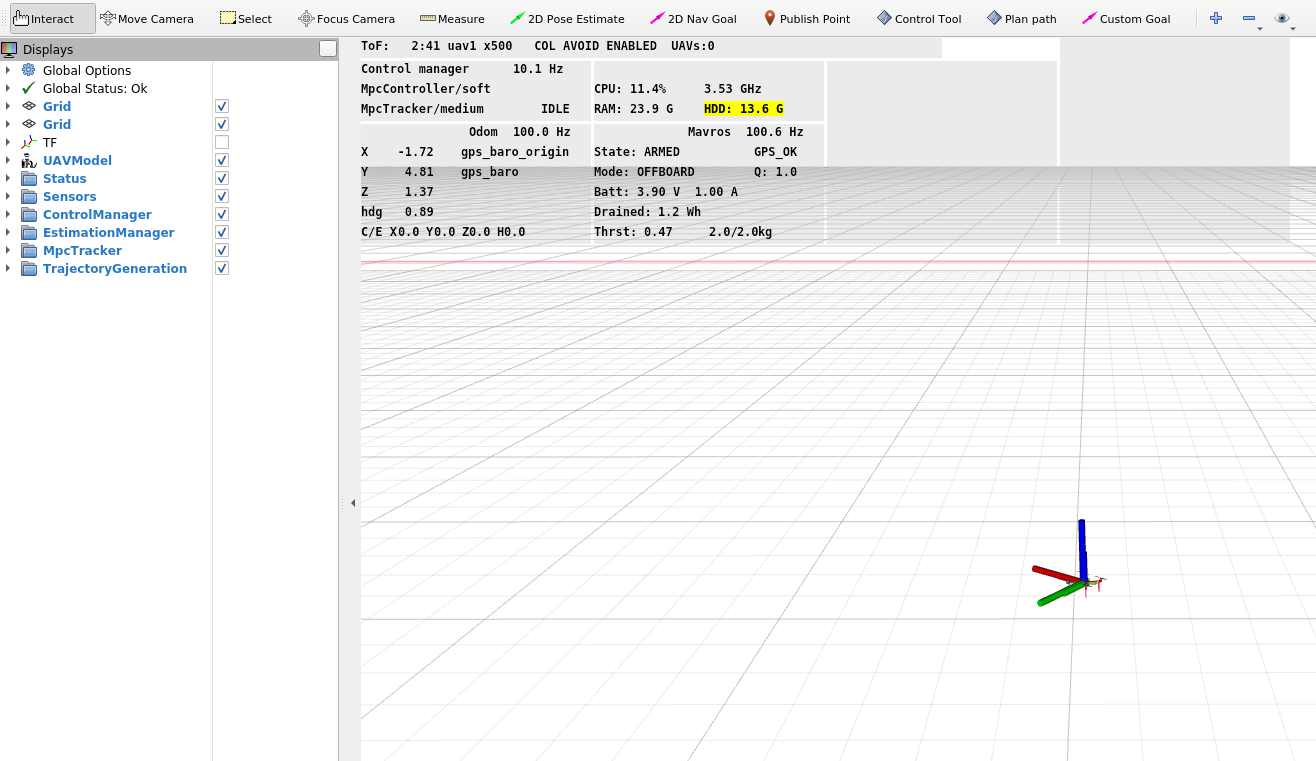
- Tmux
-
If you want to finish tmux, press
Ctrl + Shift + K, then press9. -
If you want to logout of singularity image, press
Ctrl + d.
- To compile openswarm software with the MRS UAV System dependencies, start by placing your packages into the
<mrs_apptainer>/user_ros_workspace/srcfolder of this repository. Please, follow these steps:
- Initialize and configure a new catkin workspace:
./wrapper.sh
[MRS Apptainer] user@hostname:~/singularity_poc2$ make build
- Use
make install-systo install the OpenSwarm workspace. This command-line uses wstool and will install all the ROS-packages listed in the<mrs_apptainer>/user_ros_workspace/src/.rosinstallfile.
[MRS Apptainer] user@hostname:~/singularity_poc2$ make install-sys
- Once the ROS-packages have been downloaded, build the system
[MRS Apptainer] user@hostname:~/singularity_poc2$ cd ~/user_ros_workspace/
[MRS Apptainer] user@hostname:~/singularity_poc2$ catkin build
- Run source devel/setup.bash in your terminal.
[MRS Apptainer] user@hostname:~/singularity_poc2$ source devel/setup.bash
OpenSwarm Simulator
Pre-prepared simulator
You can run a previously prepared simulator.
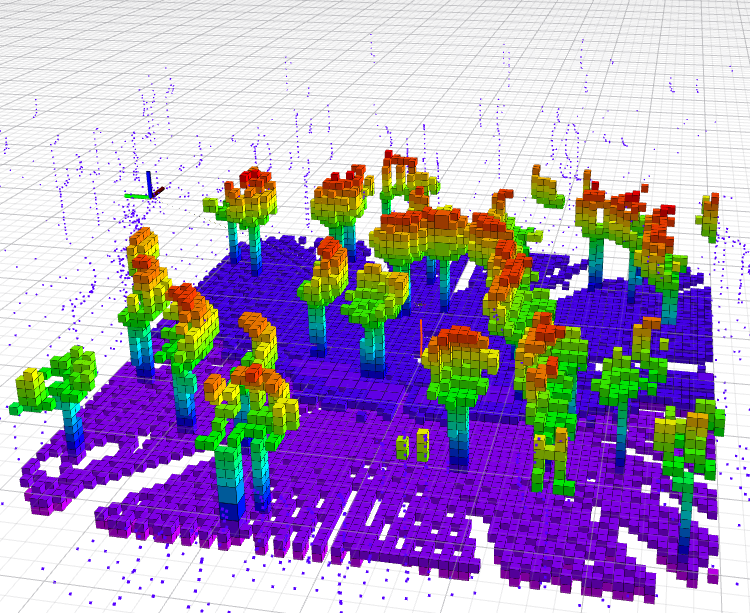
- One drone with 3D Lidar sensors
[MRS Apptainer] user@hostname:~$ roscd mrs_openswarm_simulation/tmux/one_drone_3dlidar
[MRS Apptainer] user@hostname:~$ ./start.sh
- Three drones with 3D Lidar sensors in swarm formation
[MRS Apptainer] user@hostname:~$ roscd mrs_openswarm_simulation/tmux/three_drones_swarm
[MRS Apptainer] user@hostname:~$ ./start.sh
New simulators
Please, check here